University of Maryland, College Park, USA
Teaching Assistant for CMSC426 - Computer Vision (Spring 2021).
I am a Software Engineer at Zoox, where I work on decision-making algorithms and design scalable and distributed reinforcement learning (RL) systems for autonomous robo-taxis. My work blends research and production engineering to move ideas from academic papers to large-scale, deployed systems.
I went through a “Four-Year Transform” during my bachelors in Electrical and Electronics Engineering from VNIT, Nagpur. After graduating, I worked at Morgan Stanley in Bengaluru as a full-stack developer before pursuing a Master’s in Robotics at the University of Maryland, College Park.
Currently, I am exploring action-conditioned world models for learning environment dynamics and how in-context learning can be integrated into world models or video-based planners to enable task and embodiment adaptation with improved sample efficiency. More broadly, my interests span both the applied and theoretical foundations of deep learning and RL in robotics to learn generalized and robust long-horizon policies.
Research interests: Reinforcement Learning , Generative World Models, Multimodal LLMs, Interpretability, Computer Vision , Robotics .
Fresh work and updates from the last few months.
Teaching Assistant for CMSC426 - Computer Vision (Spring 2021).
Student Mentor (2014-16), UG Academic Affairs Secretary - Student Council (2015-16)
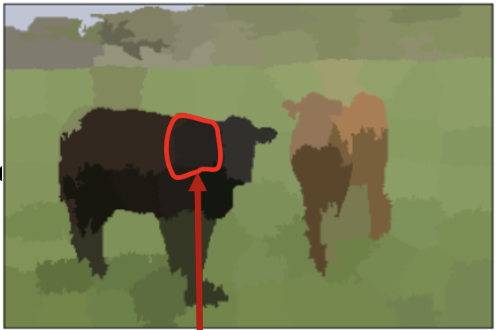
Given an image computed superpixels and classified each superpixel as one of the 9 classes of MSRC v1.
Code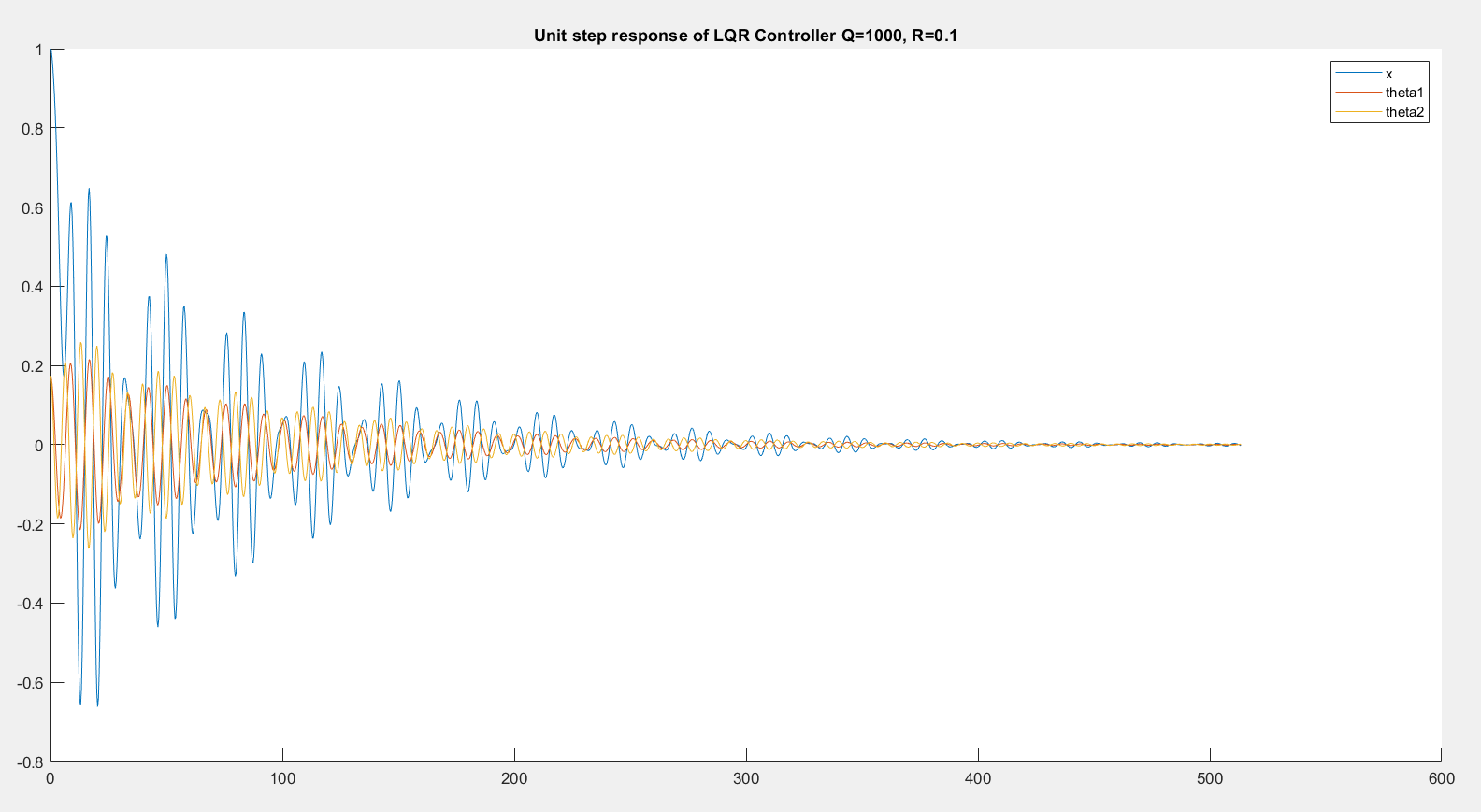
Controllers to balance two inverted pendulums on a moving cart using LQR and LQG.
Code
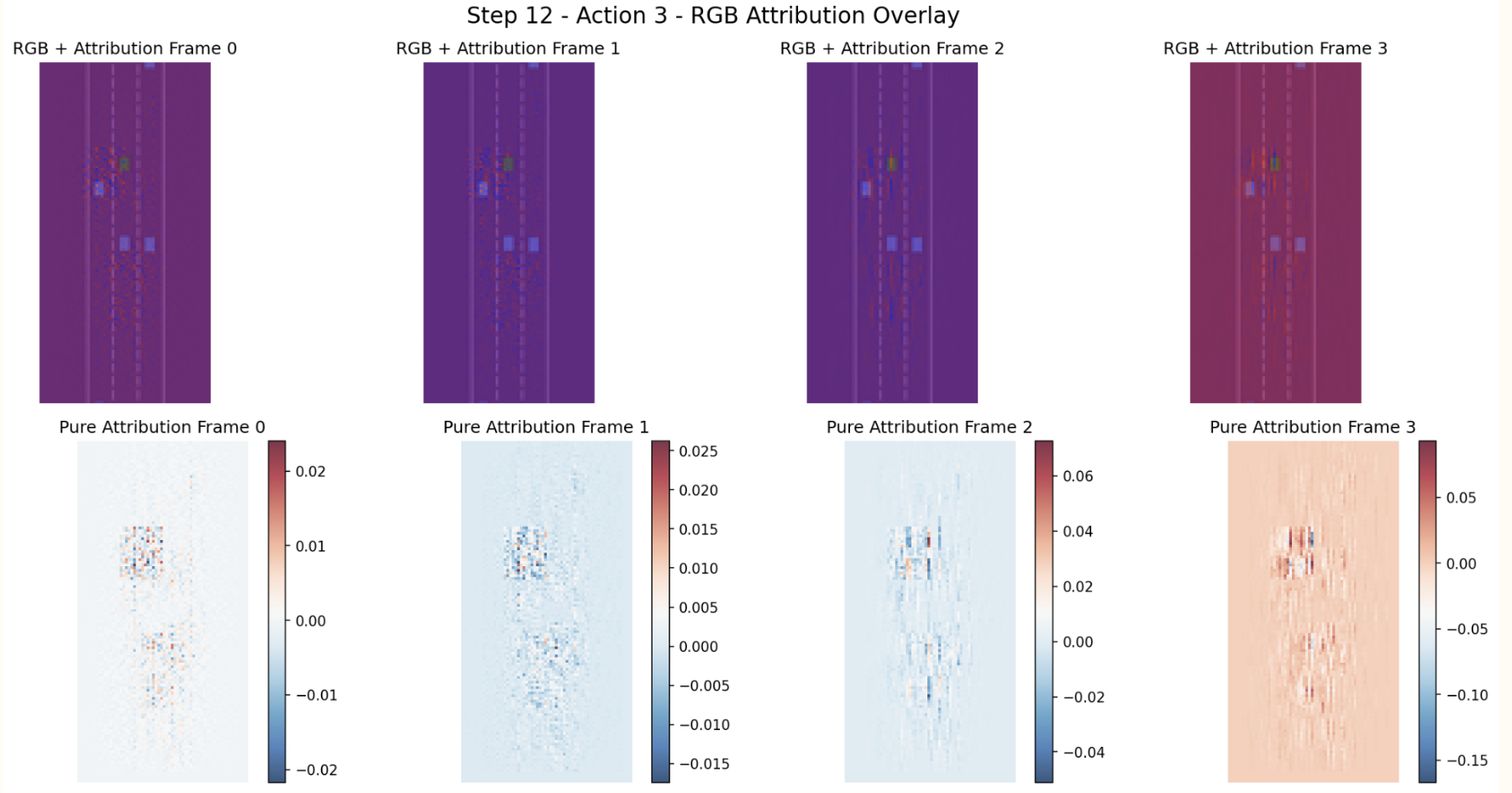
Low-level autonomous control and tracking of quadrotor using reinforcement learning - Proximal Policy Optimization (PPO).
Code
Path planning using self-adjusting roadmaps for unknown environments.
Code
Underwater Buoy detection using Gaussian Mixture Models (GMM) and Expectation-Maximization (EM) Algorithm.
CodeOpen to collaborations, speaking engagements, and research discussions.
Email: anubhavp@terpmail.umd.edu
Happy Learning! 🤝
Keep Smiling.. 🙂